
Improving how installers operate robotics systems in constrained environments by simplifying controls and increasing real-time visibility.
After six generations of incremental changes, Q-Bot’s robot control interface had become difficult to evolve. A platform migration provided the opportunity to redesign the operator experience for underfloor insulation installs in occupied homes, improving scalability and usability in the field.
This meant designing for installers operating robots in confined, low-visibility spaces, where every interaction directly impacts speed, accuracy, and confidence. I led the redesign end-to-end, working closely with engineers and field operators to deliver a system that is still in use today across 50+ robots in the UK and France.
Operators were already working in a challenging physical environment. The interface compounded that challenge with fragmented workflows, limited visibility, and unnecessary interactions, making critical tasks slower and more error-prone.
Interviews and on-site observations showed that operators had to adapt to the software, rather than the software supporting the way they worked.

I broke down the most frequent operator tasks to understand where time and effort were being lost. The friction came less from individual screens and more from moving between them: extra steps, device switching and divided attention.
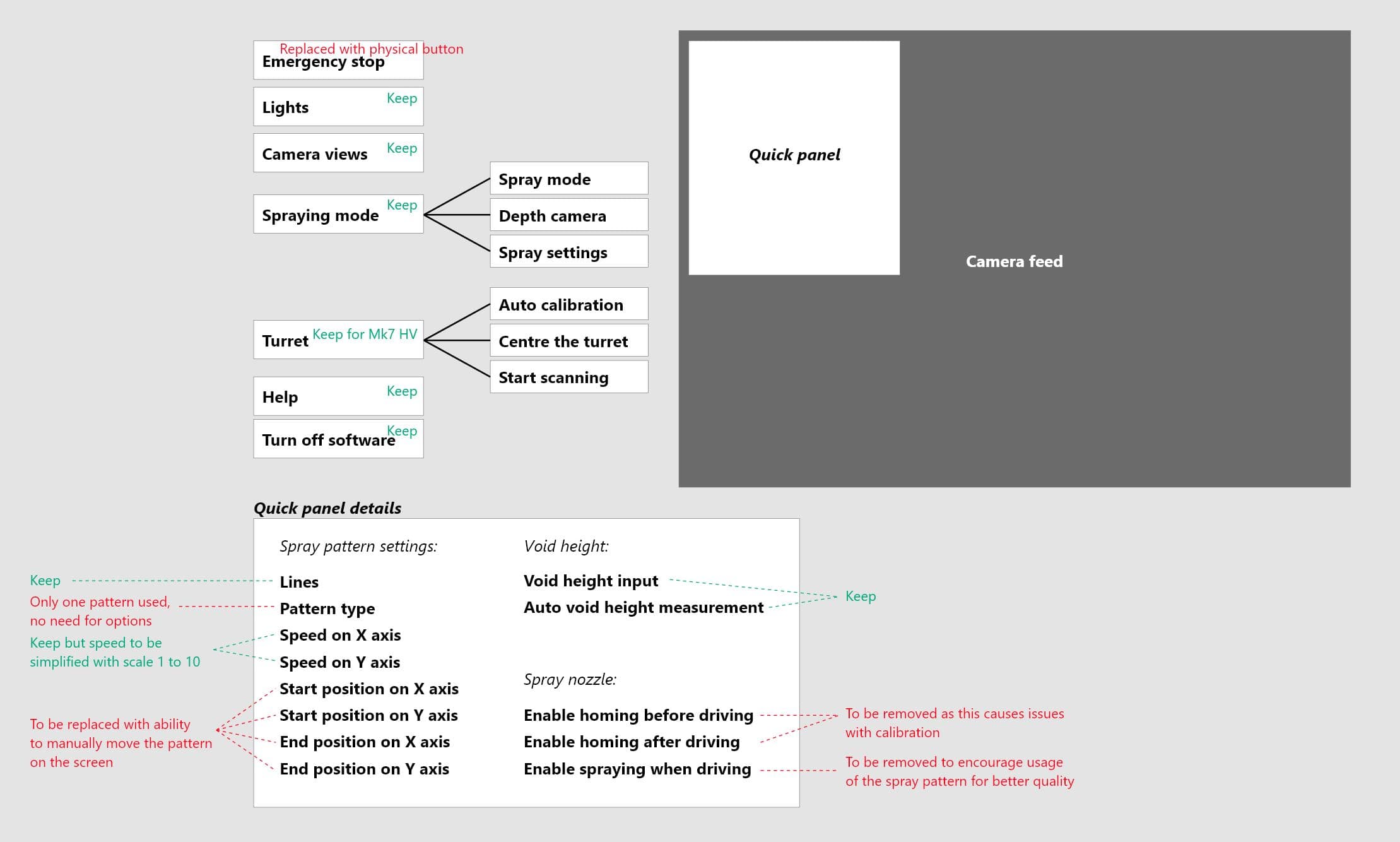
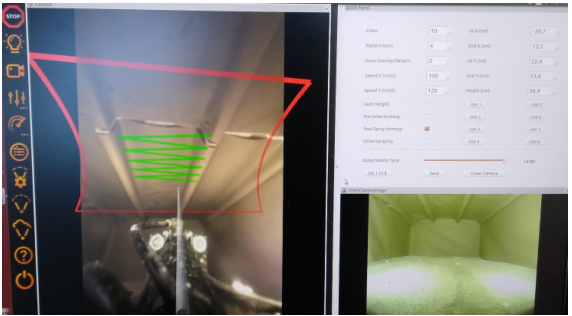
The interface included an automated spray pattern mode. On site, installers rarely used it: it required positioning the robot precisely in line with the joists, and getting that alignment right was fiddly enough that manual spraying was easier.
So we made the spray pattern rotatable. Installers no longer had to move the robot into a perfect position and they could rotate the pattern to meet the joists instead.
They now use the automated pattern when the void is clear of rubbles, and switch to manual when they need to spray around cables and pipes.
The question stopped being how do we get installers to use the automated mode and became how do we know the installation is done well on each job: the right thickness, applied the right way.
We had to work within the constraints of the robotics platform.
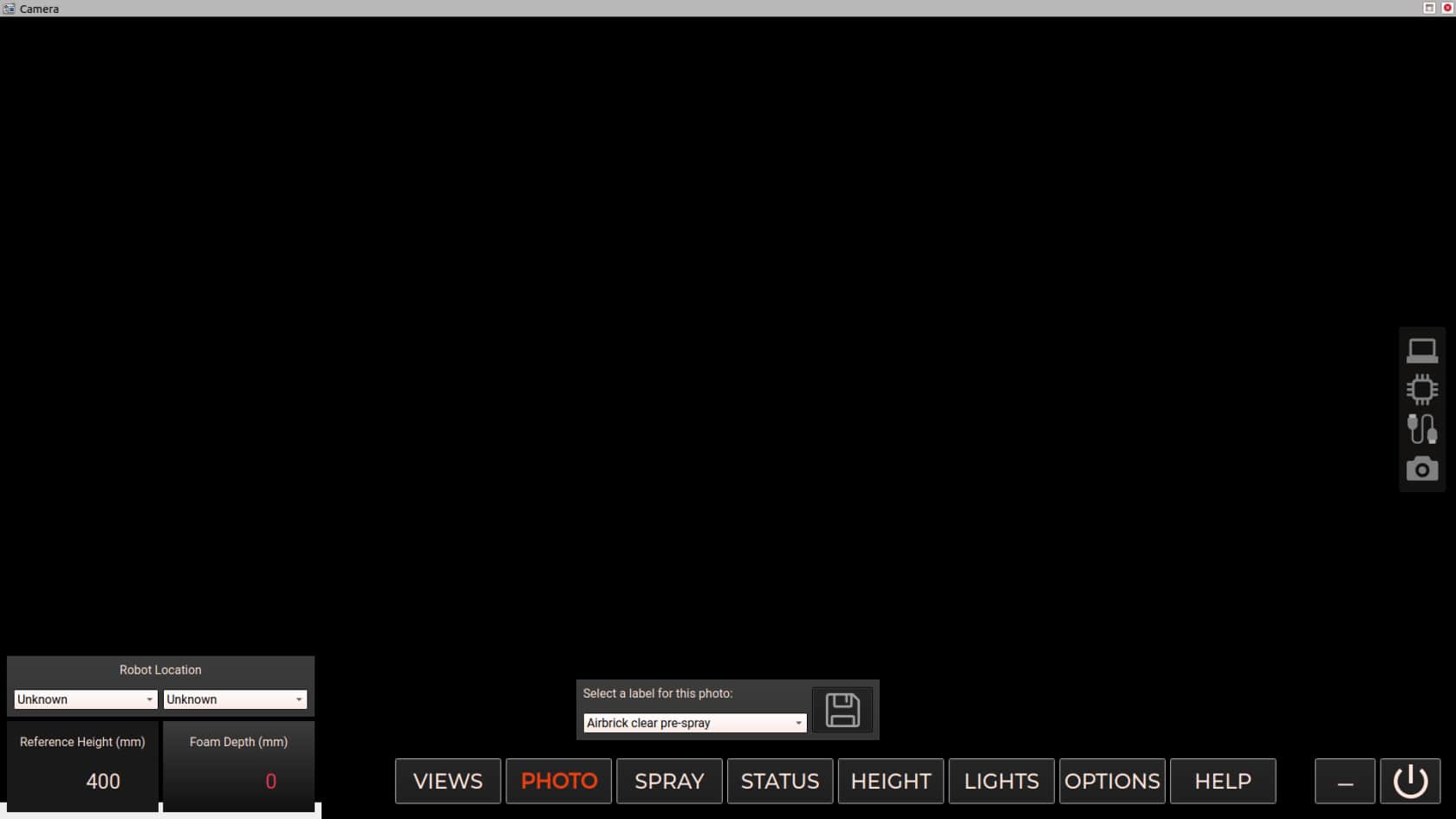
We explored displaying foam thickness as a live overlay on the camera feed, but building and maintaining it within ROS would have required significant effort for uncertain value. Instead, I designed a simple thickness readout in the bottom left corner of the screen. The installers get the information they need at a glance, without the complexity of a full visual overlay.
As a separate project, the engineering team looked at supporting onsite robot fault diagnosis. The robots can have more or less serious faults that are difficult to diagnose without specialist knowledge.
As a result, installers would often call the support team as soon as something didn’t work as expected.
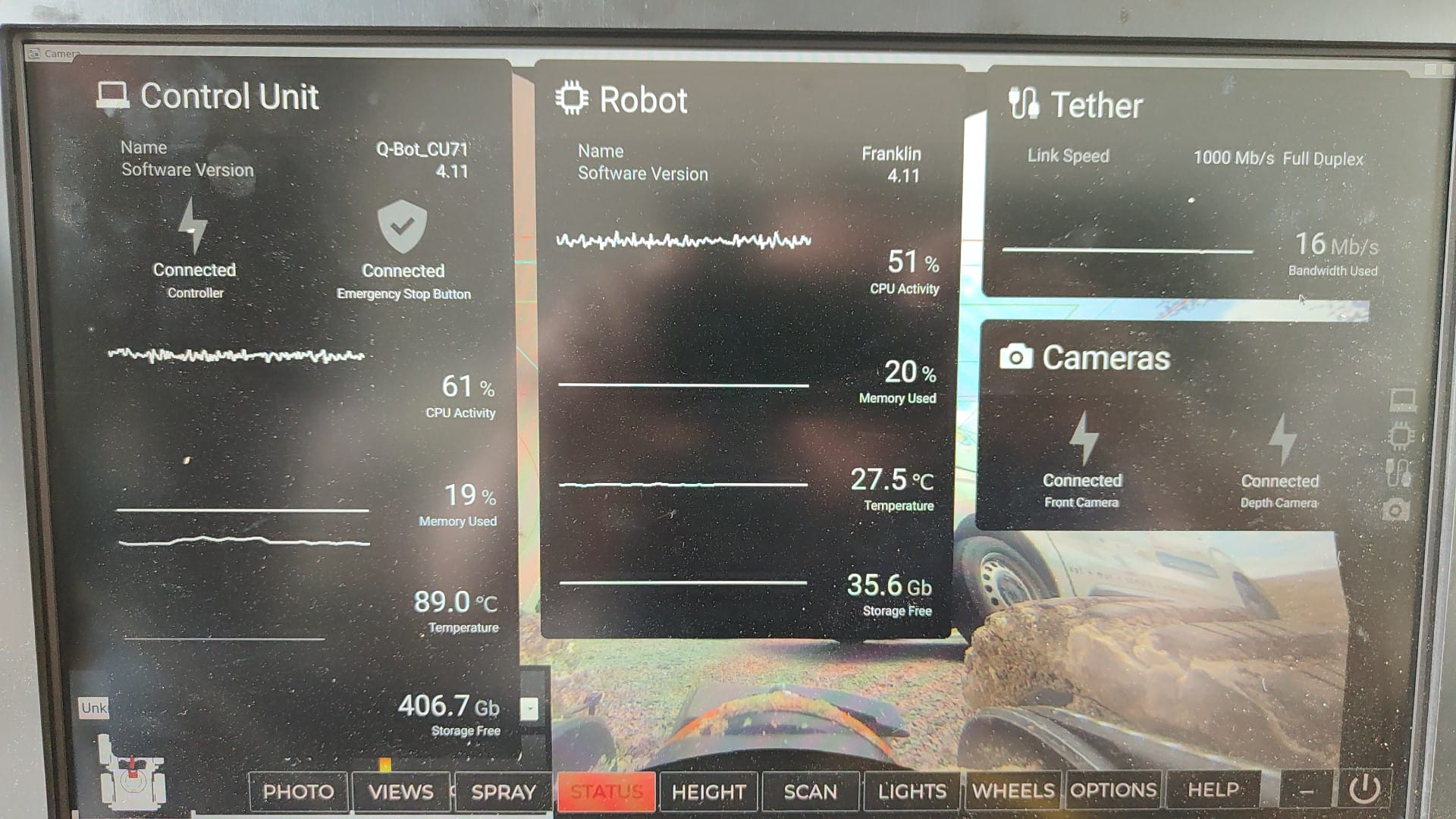
An engineer on the team created the initial concept of showing the robot’s vitals to help installers understand the root cause of issues. I built on this idea by improving how the data was visualised, making it easier for installers to diagnose and resolve issues themselves rather than relying on support.
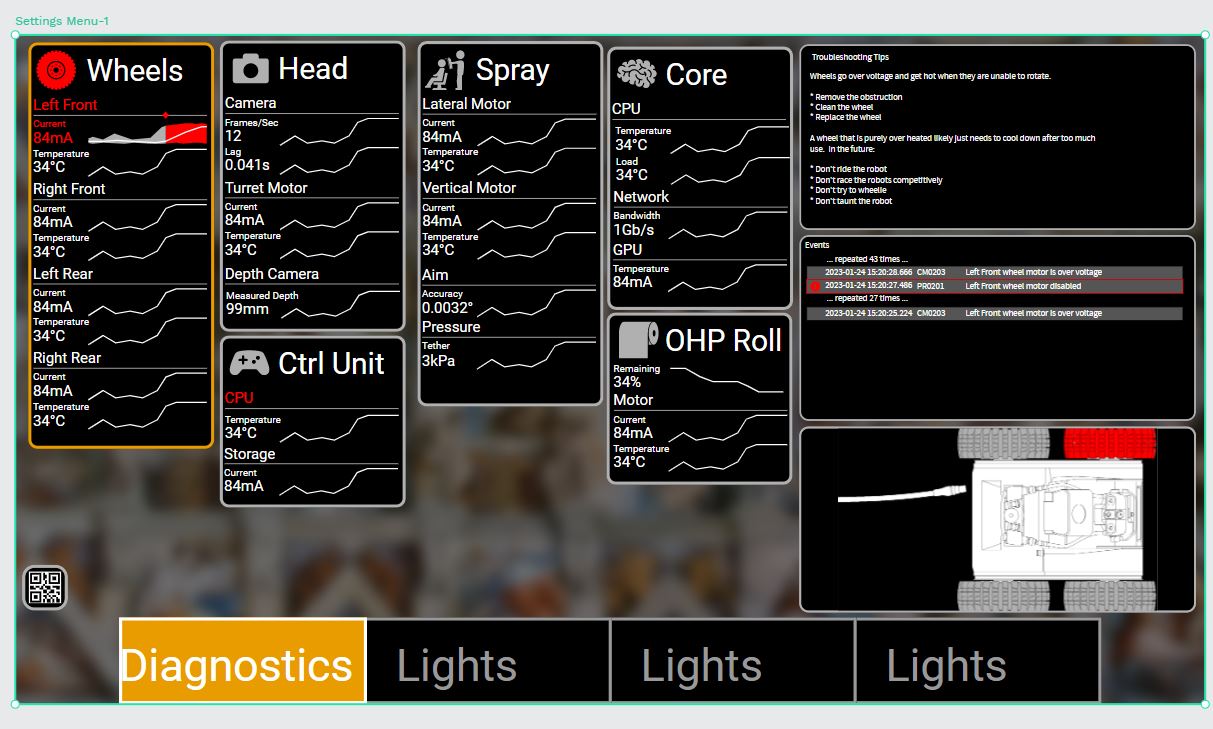

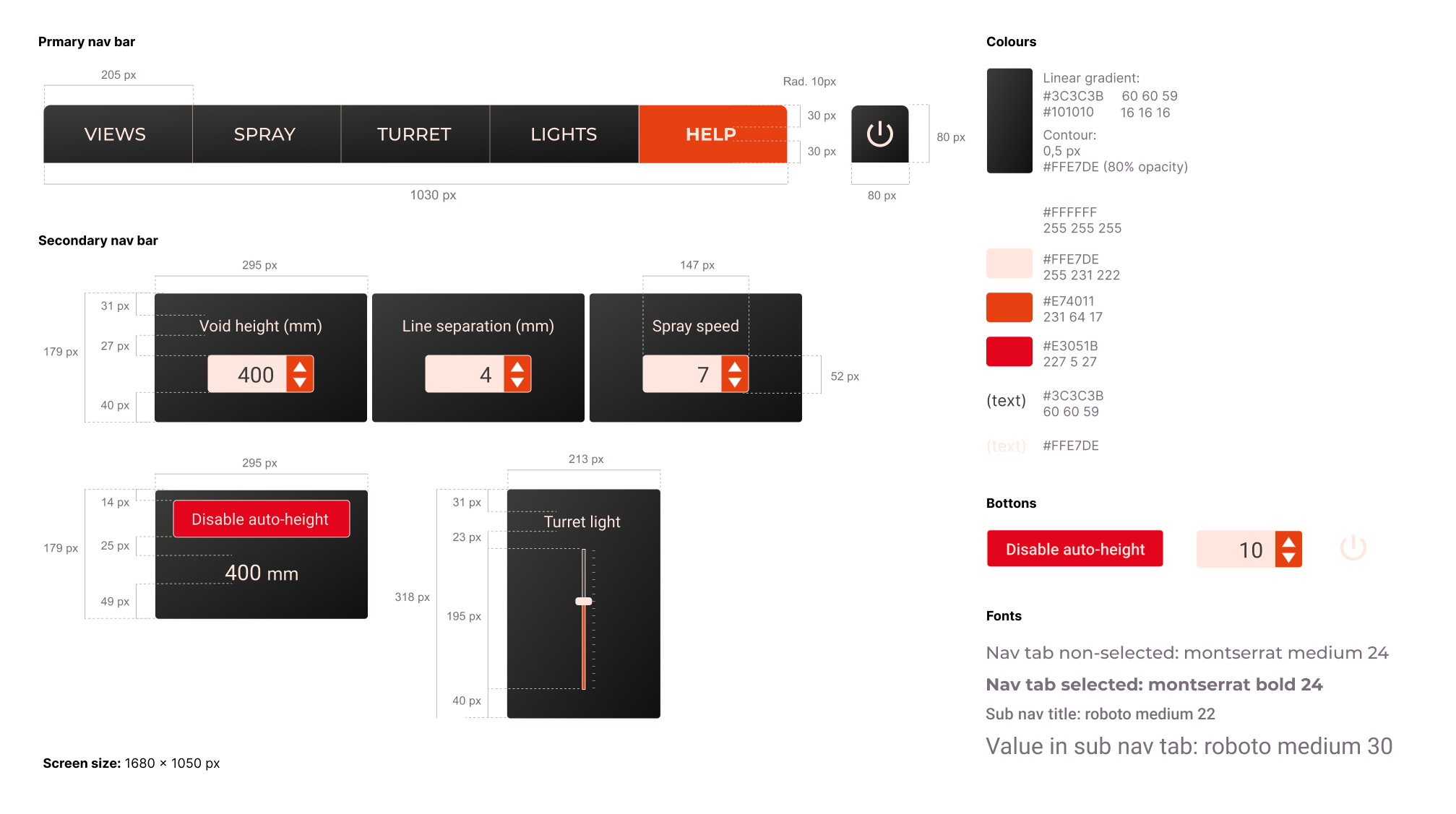
I designed a more focused and scalable interface that:
The solution was developed iteratively, balancing user needs with the technical constraints of the robotics system (ROS).
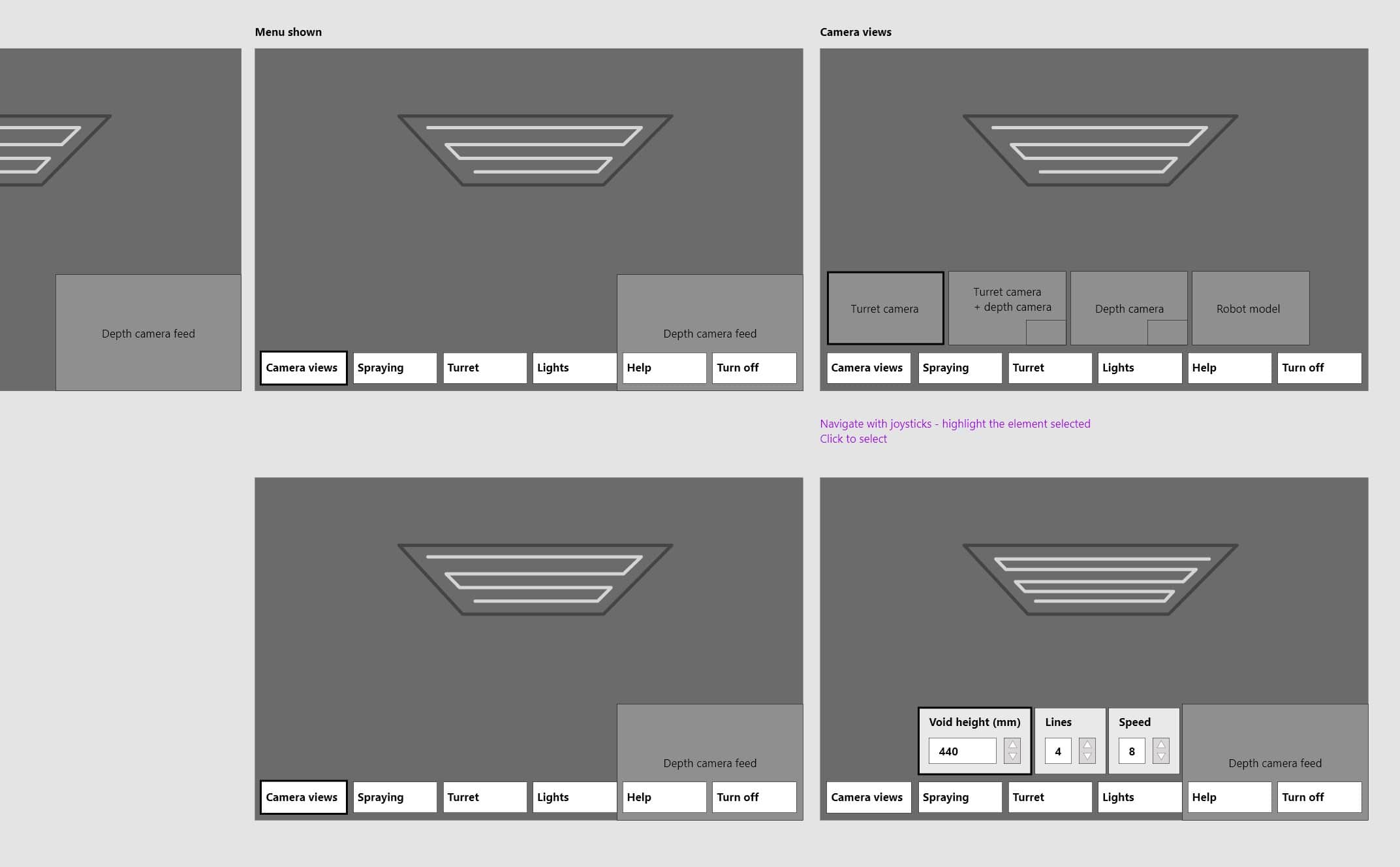
Maximising the camera feed and moving to a single gamepad-inspired input, cutting interaction cost exactly where visibility and speed matter most.
The fact that the spray pattern can be rotated makes it a lot easier to fill areas near walls. — David, Installer, Mersey Eco Grants
The Mk7 robots are a massive improvement compared to the previous version. The controls are much more user friendly. — Lee, Installer, Q-Bot
It's quicker and easier to control and the help manual is a great addition. — John, Installer, Concept Heating


Outside of work, I'm currently building side projects and am always happy to discuss or get involved in problem-solving challenges. Have something in mind? Get in touch.
Email me